




Аварийно-спасательные работы часто проводятся в условиях бездорожья, завалов, радиационного и химического заражения, задымленности и т.п. Чтобы снизить риск травматизма и гибели спасателей, а также облегчить разведку и поиск пострадавших в сложных условиях в мире постоянно ведутся научно-исследовательские работы по созданию и усовершенствованию робототехнических устройств для этих целей.
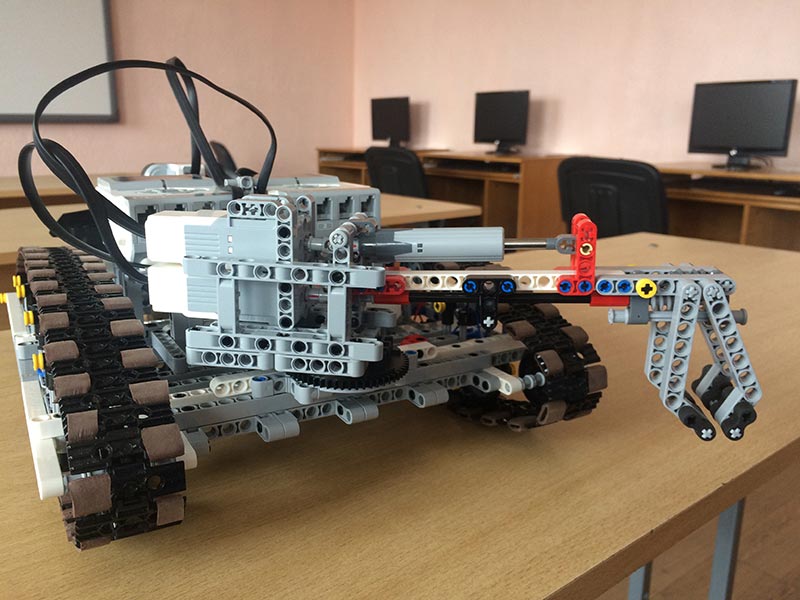
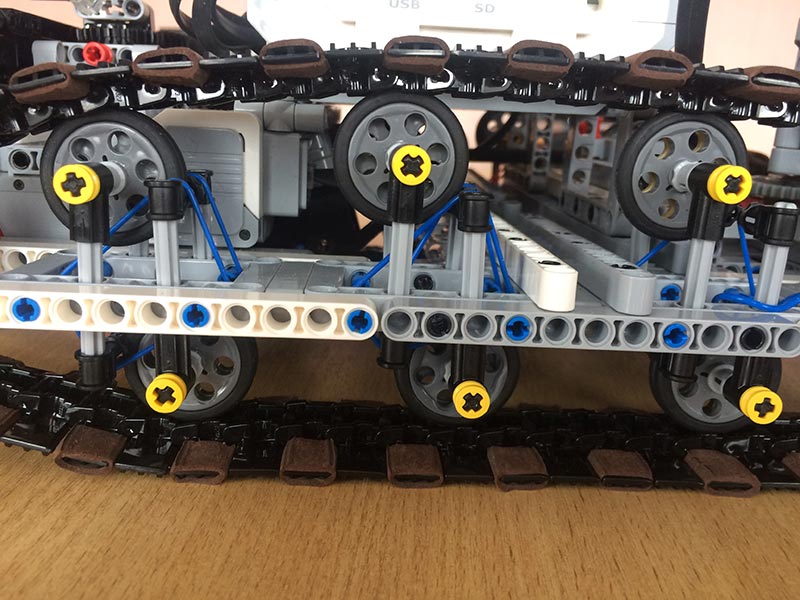
Для перемещения робот — спасатель использует гусеничное шасси с мягкой подвеской, приводимое в движение двумя сервомоторами. Две широкие гусеницы, каждая из которых снабжена восемью катками с амортизаторами, позволяет роботу перемещать по пересеченной местности, оврагам, преодолевать завалы и подниматься в гору под углом, близким к 45º.
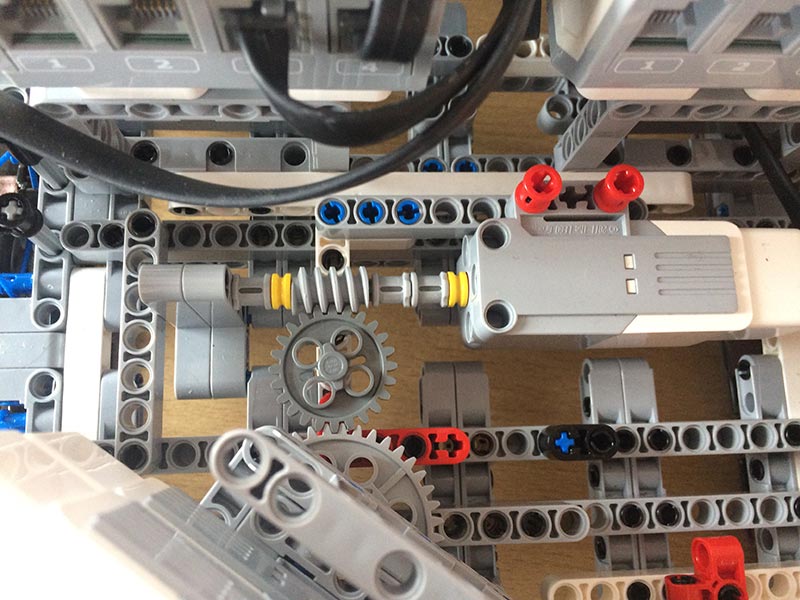
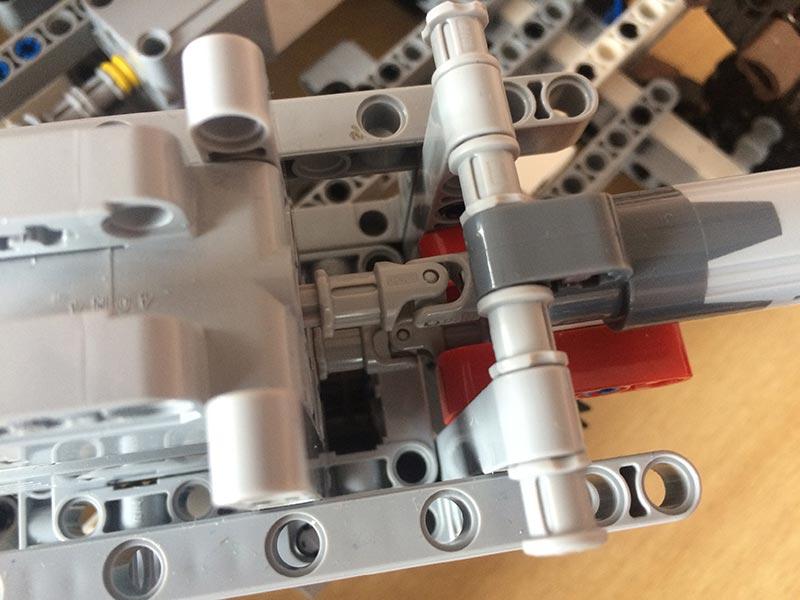
Для ориентации используется ультразвуковой и гироскопический датчики. Разбор завалов, подъем и перемещение предметов осуществляется с помощью специального манипулятор-захвата, который приводится в движение тремя средними сервомоторами с использованием шестеренчатой, червячной и карданной передач.
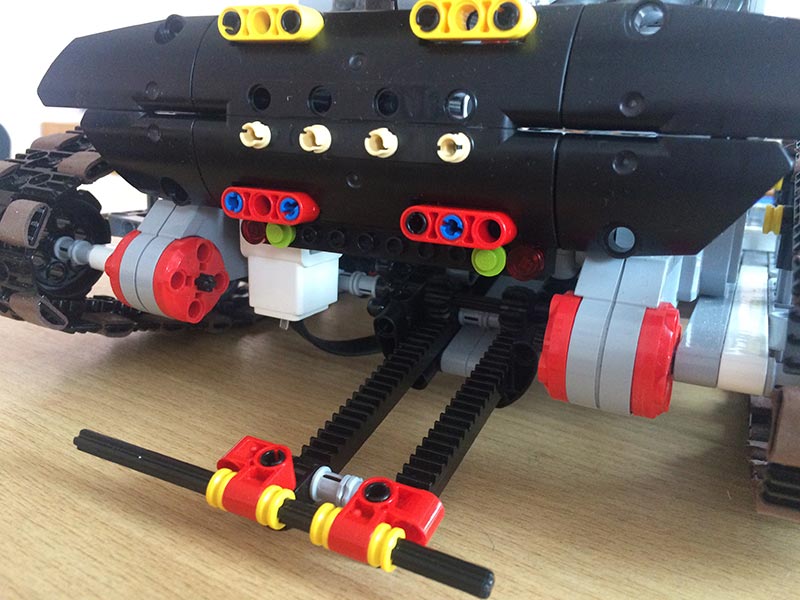
Кроме того робот-спасатель снабжен специальным устройством для спасения людей, провалившихся в прорубь.
Робот может функционировать в двух режимах: в автономном и в режиме дистанционного управления оператором.
Для написания программ управления использовался язык программирования Python.
В автономном режиме робот может прокладывать кратчайший маршрут между путевыми точками, которые задаются оператором дистанционно, и двигаться по нему, объезжая препятствия, встречающиеся на пути. Для этого используется инерциальная навигация. Инерциальная навигация — это метод навигации (определения координат и параметров движения различных объектов — судов, самолётов, ракет и др.) и управления движением объектов, основанный на свойствах инерции тел, являющийся автономным, то есть не требующим наличия внешних ориентиров или поступающих извне сигналов. Сущность инерциальной навигации состоит в определении ускорения объекта и его угловых скоростей с помощью установленных на движущемся объекте приборов и устройств, а по этим данным — местоположения (координат) этого объекта, его курса, скорости, пройденного пути и др., а также в определении параметров, необходимых для стабилизации объекта и автоматического управления его движением.
В режиме дистанционного управления робот выполняет работы по разборке завалов, подъему и перемещению различных предметов, поиску и спасению пострадавших. В данном случае роботом по беспроводному соединению управляет оператор.
Инструкция по сборке — Модель LDD